Goal-Space Planning with Subgoal Models
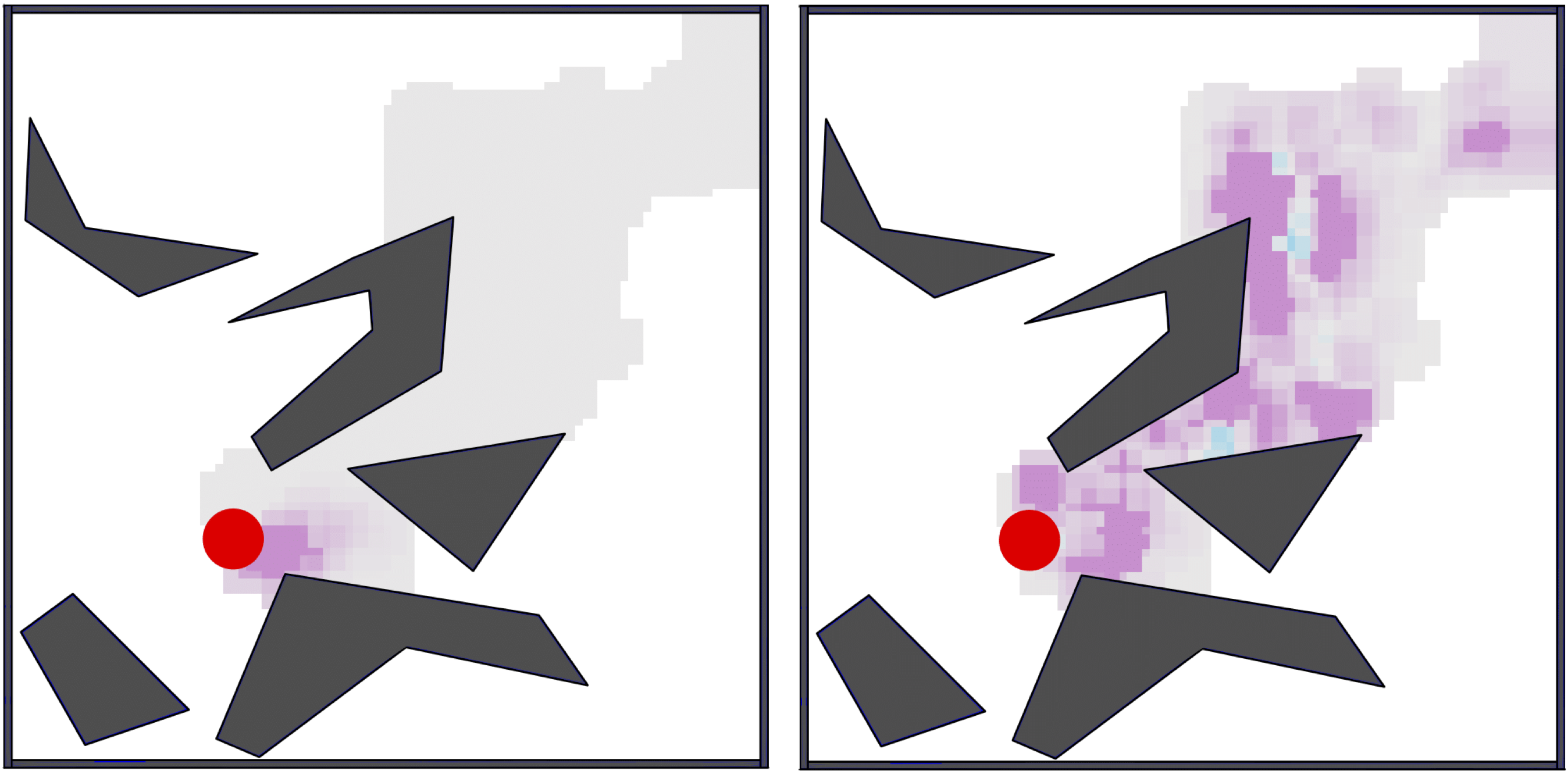
We propose a long-horizon background-planning algorithm for online RL. This used subgoal models (abstract in state & time) for faster long-term decision making & smarter value propagation.
We propose a long-horizon background-planning algorithm for online RL. This used subgoal models (abstract in state & time) for faster long-term decision making & smarter value propagation.
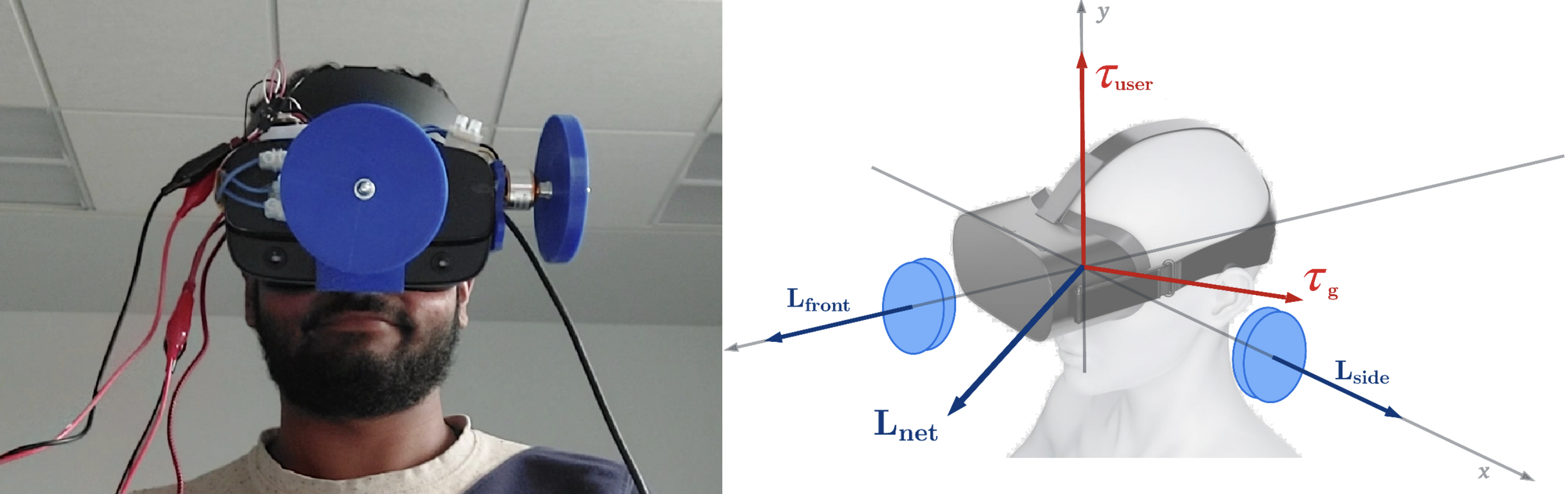
We augment a virtual reality headset to include two motor-driven discs, which induce a controllable gyroscopic torque on the wearer’s head.